- Summits
- Sponsorship
- Retreats
- Media Opportunities
- News
- About
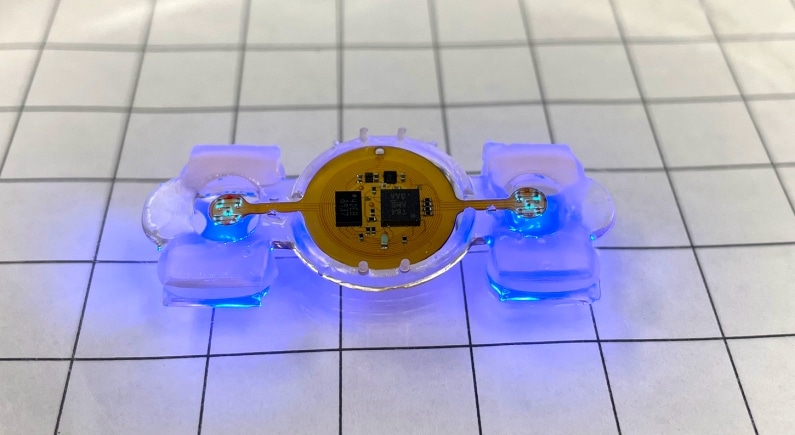
Researchers at the University of Illinois at Urbana-Champaign have developed biohybrid robots that combine soft materials, biological muscle tissue, and wireless electronic components.
Integrating these components, they were able to create a first-of-its-kind class of remote-controlled hybrid ‘eBiobot’
Summarily, the biobots are made such that they could be controlled remotely through optogenetics.
The muscle component forms an optogenetic actuator and creates movement when exposed to light. Activating onboard micro-LEDs, the researchers can then wirelessly control the movement and also stimulate the muscle actuators to propel the biobot.
This study presents remote-controlled biohybrid robots using mouse cells-based optogenetic muscle actuators and wireless optoelectronics. These biohybrid robots were designed and fabricated to bring together 3 different classes of components: wireless optoelectronics, biological muscle actuators, and 3D-printed hydrogel scaffolds.
For the electronics fabrication, a UV laser ablation process was employed to cut out the optoelectronics circuit layout. The device contains a circular receiver antenna coil and optoelectronic components. A customized software connected to the transmission antenna using the power distribution box was utilized in controlling the stimulation protocols through near-field communication technology in real-time.
For the 3D printed scaffold, the centimetre scale hydrogel structure was designed and printed. The optogenetic myoblast cells were seeded on the 3D-printed mold and differentiated into myotubes to form the muscle actuator around the hydrogel skeleton.
Using tweezers, the optoelectronics device was assembled unto the skeleton for the optoelectronics device to stimulate the muscle actuator. This biohybrid robot is referred to as an ‘eBiobot’.
Remote-controlled LEDs stimulate the muscle actuator, resulting in deflection of the soft hydrogel scaffold, which subsequently creates a walking movement on the eBiobot, with a speed of about 0.8mm/s.
The scaffold is carefully designed to be asymmetric resulting in the net movement of the eBiobot in one direction. eBiobot walking was computationally modelled using the solver Elastica and optimally designed the scaffold characteristics so that the muscle contractions could give rise to the maximum forward walking speed of eBiobot.
3D-printed accessory tools were also attached to enable the eBiobot to complete other robotic functions, such as plowing and transporting.
In a step towards enhanced manoeuvrability, a higher-order bipedal architecture was designed to have two muscle actuators in combination with a microcontroller-containing advanced optoelectronics device.
The bipedal eBiobot with different stimulations on the left and right muscle actuators could allow the eBiobot to turn and be controlled to move through an obstacle course.
Demonstrated also was a console system connected with several gaming controllers for the individual manipulation of multiple eBiobots.
The backbone of this study is optogenetics, a technique in which, like its name, light stimulation produces specific effects in genetically modified cells. This technique opens doors to many possibilities and opportunities which may end up being useful for biomedical applications.
However, light has to reach the modified cells or tissues for the desired effect to be produced, which can be quite difficult to achieve in the human body. One of the solutions earlier thought of is the use of fibre optic cables that are advanced into the body, but this invasive procedure is not only cumbersome but could also expose the individual to infection.
The researchers at the University of Illinois at Urbana-Champaign, however, having been on this topic for over a decade, have taken optogenetics to the next level by using it as the basis for movement in a centimetre-scale biobot.
The eBiobots incorporate soft materials, 3D printed hydrogel scaffolds, with mouse muscle tissue that is light sensitive and can produce movement when stimulated with the correct type of light.
The question of how the biobot will work inside the body is therefore inevitable. Simply put, the approach that would defy this roadblock would enable the device to self-illuminate in response to a wireless command, and subsequently produce movement.
Being goal-oriented, the researchers tackled what was left of the shortcomings head on, creating a solution that integrates microelectronic components, including a receiver coil that allows the biobots to harvest their own power, into the device that would allow it to illuminate several on-board micro-LEDs.
To ensure accurate movements, the researchers make sure that each micro-LED illuminates a different portion of the muscle tissue within the biobot.
While speaking about the study, Rashid Bashir, a researcher involved in the study, said “Integrating microelectronics allows the merger of the biological world and the electronics world, both with many advantages of their own, to now produce these electronic biobots and machines that could be useful for many medical, sensing and environmental applications in the future.”
Click here for more Med-tech news.
Main image courtesy of: Yongdeok Kim/Illinois News Bureau





